 當前位置:
當前位置:

般常用的水平位移監(jiān)測方法有:視準線法、測小角法、前方交會法、極坐標法和反演小角法。
當要觀測某一特定方向(譬如垂直于基坑維護體方向)的位移時,經(jīng)常采用視準線法、小角度法等觀測方法。
但當變形體附近難以找到合適的工作基點或需同時觀測變形體兩個方向位移時,則一般采用前方交會法。
水平位移觀測觀測實踐中利用較多的前方交會法主要有兩種:測邊前方交會法和測角前方交會法。
另外還有極坐標法以及一些困難條件下的水平位移觀測方法。
在非煤礦山領域,尾礦壩的位移監(jiān)測常用到視準線法和前方交匯法,本期我們將著重介紹一下這兩種方法。
1
視準線法
當需要測定變形體某一特定方向(譬如垂直于基坑維護體方向)的位移時,常使用視準線法或測小角法。
原理
如下圖所示,點A、B是視準線的兩個基準點(端點),1、2、3為水平位移觀測點。觀測時將經(jīng)緯儀置于A點,將儀器照準B點,將水平制動裝置制動。
豎直轉動經(jīng)緯儀,分別轉至1、2、3 三個點附近,用鋼尺等工具測得水準觀測點至A—B這條視準線的距離。根據(jù)前后兩次的測量距離,得出這段時間內水平位移量。

精度分析
由基準線的設置過程可知,觀測誤差主要包括儀器測站點儀器對中誤差,視準線照準誤差,讀數(shù)照準誤差,其中,影響a大的無疑是讀數(shù)照準誤差。
可知,當即準線太長時,目標模糊,讀數(shù)照準精度太差;且后視點與測點距離相差太遠,望遠鏡調焦誤差較大,無疑對觀測成果有較大影響。
另外此方法還受到大氣折光等因素的影響。
優(yōu)點
視準線觀測方法因其原理簡單、方法實用、實施簡便、投資較少的特點, 在水平位移觀測中得到了廣泛應用,并且派生出了多種多樣的觀測方法,如分段視準線,終點設站視準線等。
不足
對較長的視準線而言, 由于視線長, 使照準誤差增大, 甚至可能造成照準困難。當即準線太長時,目標模糊,照準精度太差且后視點與測點距離相差太遠,望遠鏡調焦誤差較大,無疑對觀測成果有較大影響。精度低,不易實現(xiàn)自動觀測,受外界條件影響較大,而且變形值(位移標點的位移量)不能超出該系統(tǒng)的a大偏距值,否則無法進行觀測。
2
前方交會法
如果變形觀測點散布在變形體上或者在變形體附近無合適的基準點可供選擇時,人們常用前方交會法來進行觀測,這時,基準點選擇在面對變形體的遠處。前方交會法主要有兩種:測邊前方交會法和測角前方交會法。
測角前方交會法
原理
如圖所示:
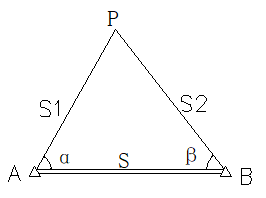
用經(jīng)緯儀在已知點A,B上測出α和β角,計算待定點P的坐標。
精度分析
其前方交會點P的點位中誤差的公式為:

式中mβ為測角中誤差,ρ〞=206265,S為A,B間距離。對該式的進一步分析表明:當γ=90°時,點位中誤差不隨α,β的變化而變化。
當γ>90°時,對稱交會時的點位中誤差a小,精度a高。
當γ<90°時,對稱交會時點位中誤差a大,對精度不利。
測邊前方交會法
原理
如圖所示
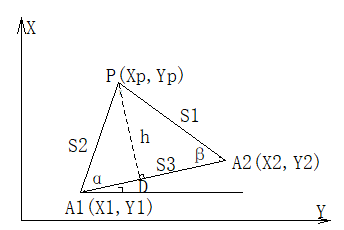
P表示位移點,A1,A2表示工作基點。設A1坐標為(X1,Y1),A2坐標為(X2,Y2),P坐標為(XP,YP)。
觀測S1,S2邊,求交會點P的坐標。用測距儀在A1點測得A1到P點的平距為S1,在A2點測得A1到P點的平距為S2。基線平距S3在aa觀測后即可以將其固定。
由上圖可得:
XP=X1+AD*cosω-h*sinω
YP=Y1+AD*sinω+h*cosω
式中,AD=(s12+s32-s22)/2s3,h=√(s12-AD2)
設P點的位移為△XP,△YP,相應的水平距離變化為△S1,△S2。
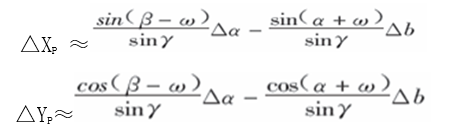
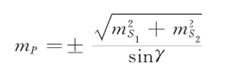
精度分析
設邊長S1,S2的測距中誤差為ms1,ms2,則測邊交會的點位精度可用下式表示:
設交會邊長S1,S2的觀測誤差為ms1,ms2,則m△s1=√2ms1, m△s2=√2ms2,可得位移中誤差公式如下:
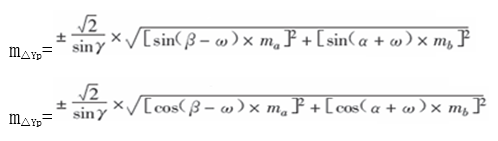
位移點P的位移誤差

優(yōu)點
前方交會法相對于其他水平位移觀測的方法如視準線法、小角度法等具有以下優(yōu)點:
① 基點布置有較大靈活性。前方交會法的工作基點一般位于面向測點并可以適當遠離變形體,而視準線法等方法的工作基點必須設置在位于變形體附近并且必須基本與測點在同一軸線上,所以前方交會法工作基點的選擇更具靈活性。特別是當變形體附近難以找到合適的工作基點時,前方交會法更能顯出其優(yōu)點。
②前方交會法能同時觀測2個方向的位移。
③觀測耗時少。當測點較多,并分布在多條直線上時,前方交會法的耗時較視準線等方法少。
不足
前方交會法由于受測角誤差、測邊誤差、交會角及圖形結構、基線長度、外界條件的變化等因素影響,精度較低。
另外,其觀測工作量較大,計算過程較復雜,故不單獨使用,而是常作為備用手段或配合其他方法使用。
特別的,對于邊長交會法,由于測距儀的測距精度包含固定誤差和比例誤差,當距離增加時其誤差也會增大。
在選擇工作基點時,除要滿足通視和工作基點的穩(wěn)定性外,還必須考慮工作基點與測點間的視距不要過長。
耀杰建設-礦山工程全方位服務者


